Best Fit Roles
- Embedded Software Intern
- Robotics / Mechatronics Intern
- Systems or Integration Engineering Intern
- Data-focused technical internship with strong implementation work
Engineering Profile
University of Washington - ECE + Data Science
Embedded Systems Intern | Robotics Intern | Systems Integration Intern
Available for Summer/Fall 2026 internships
Electrical & Computer Engineering + Data Science student building embedded systems, robotics workflows, and reliable engineering prototypes.
I am a University of Washington student who enjoys turning technical ideas into working systems. My work spans firmware, sensing, robotics modeling, PCB design, and data-driven problem solving, with a strong focus on debugging, integration, and practical execution.
Quick Takeaways
About
I am pursuing dual bachelor's degrees in Electrical & Computer Engineering and Applied Mathematics: Data Science at the University of Washington. I am most energized by work that sits between software, hardware, and system-level problem solving.
Across coursework, internships, and club projects, I have built a habit of shipping real technical work: debugging embedded labs, prototyping sensor-based devices, modeling robotic motion, and organizing messy data into usable engineering outputs.
Experience
ARC Lab | Part-time | Seattle, WA
University of Washington - EE/CSE 474: Embedded Systems
Shenzhen Volcos Technology Co., Ltd.
EMA Yingma Tech Co., Ltd.
Syron Intelligent Lock Co., Ltd.
Projects
Embedded Systems
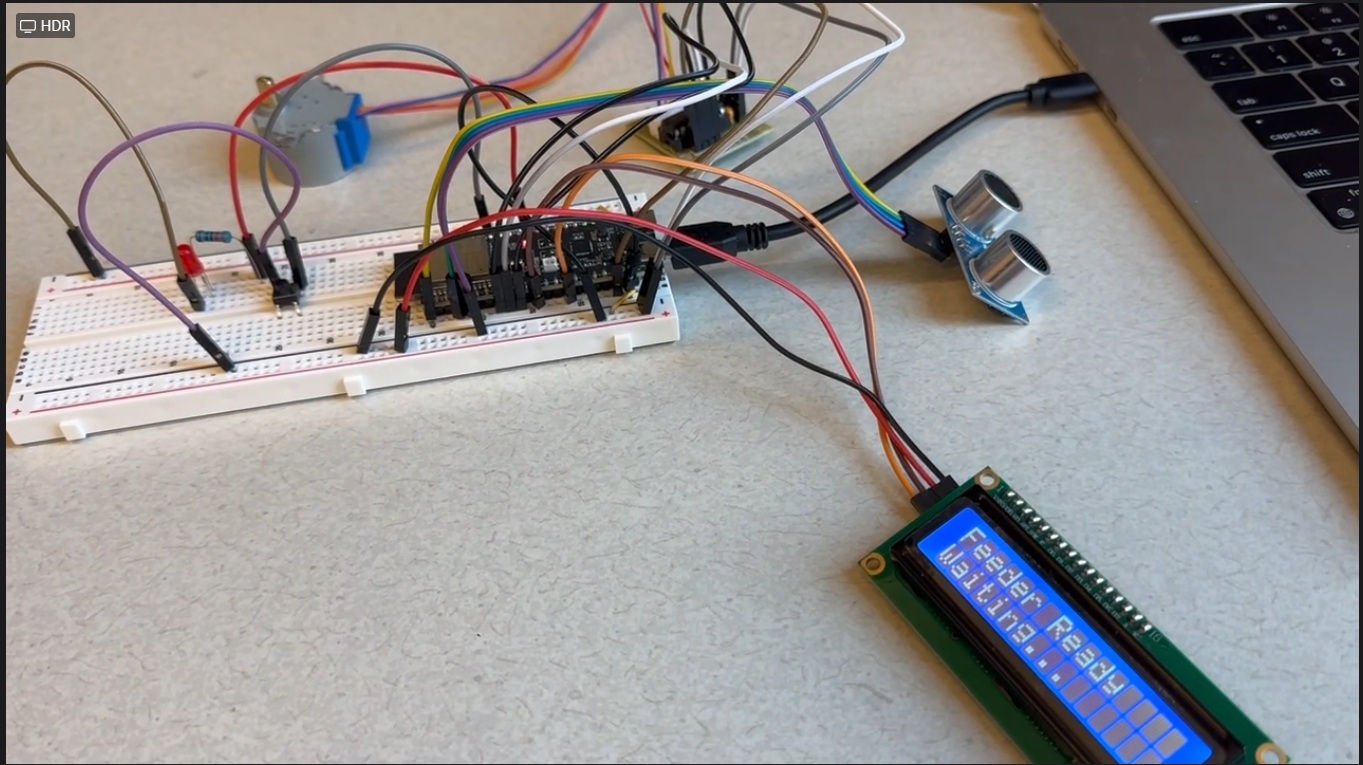
Built a real-time embedded prototype on ESP32-S3 with interrupt-driven ultrasonic sensing, hardware timers, buffered sensor logic, and state-machine motor control for automated feeding and cleaning behavior.
What this demonstrates: Real firmware structure, timing reliability, and sensor-to-actuator integration under practical constraints.
Robotics Modeling
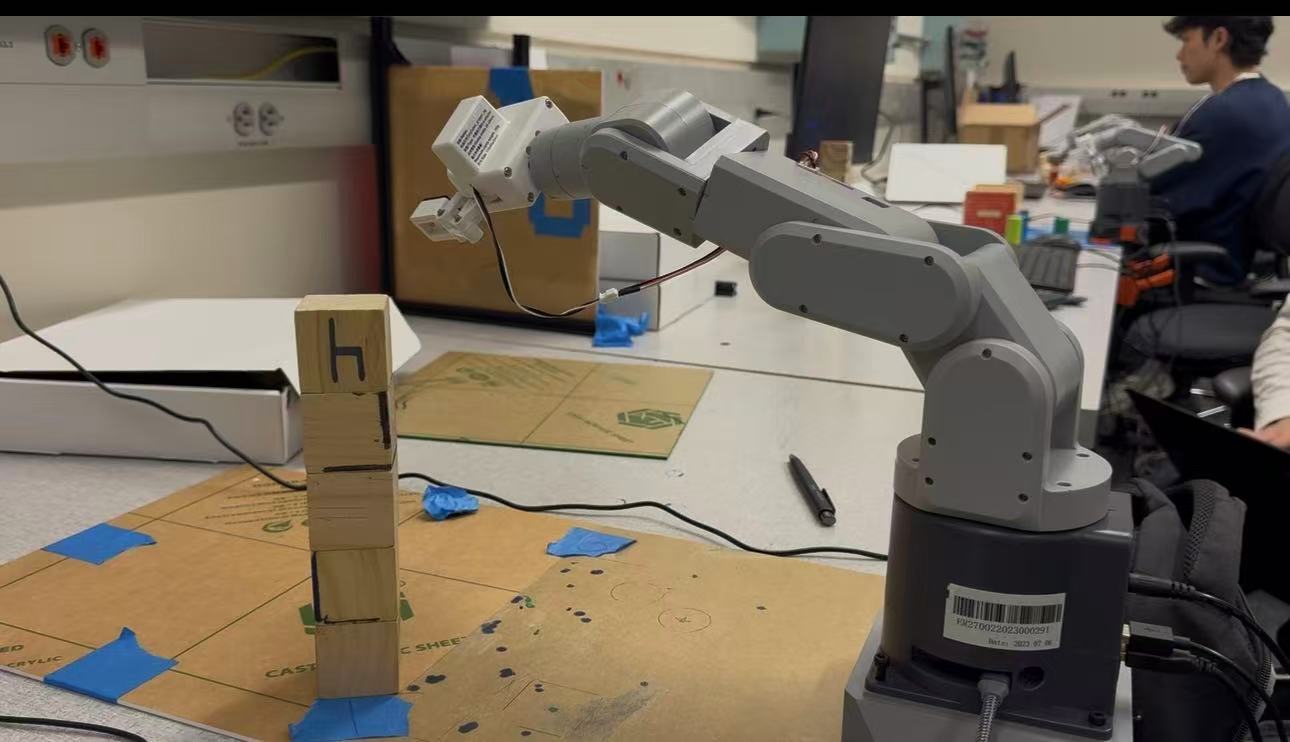
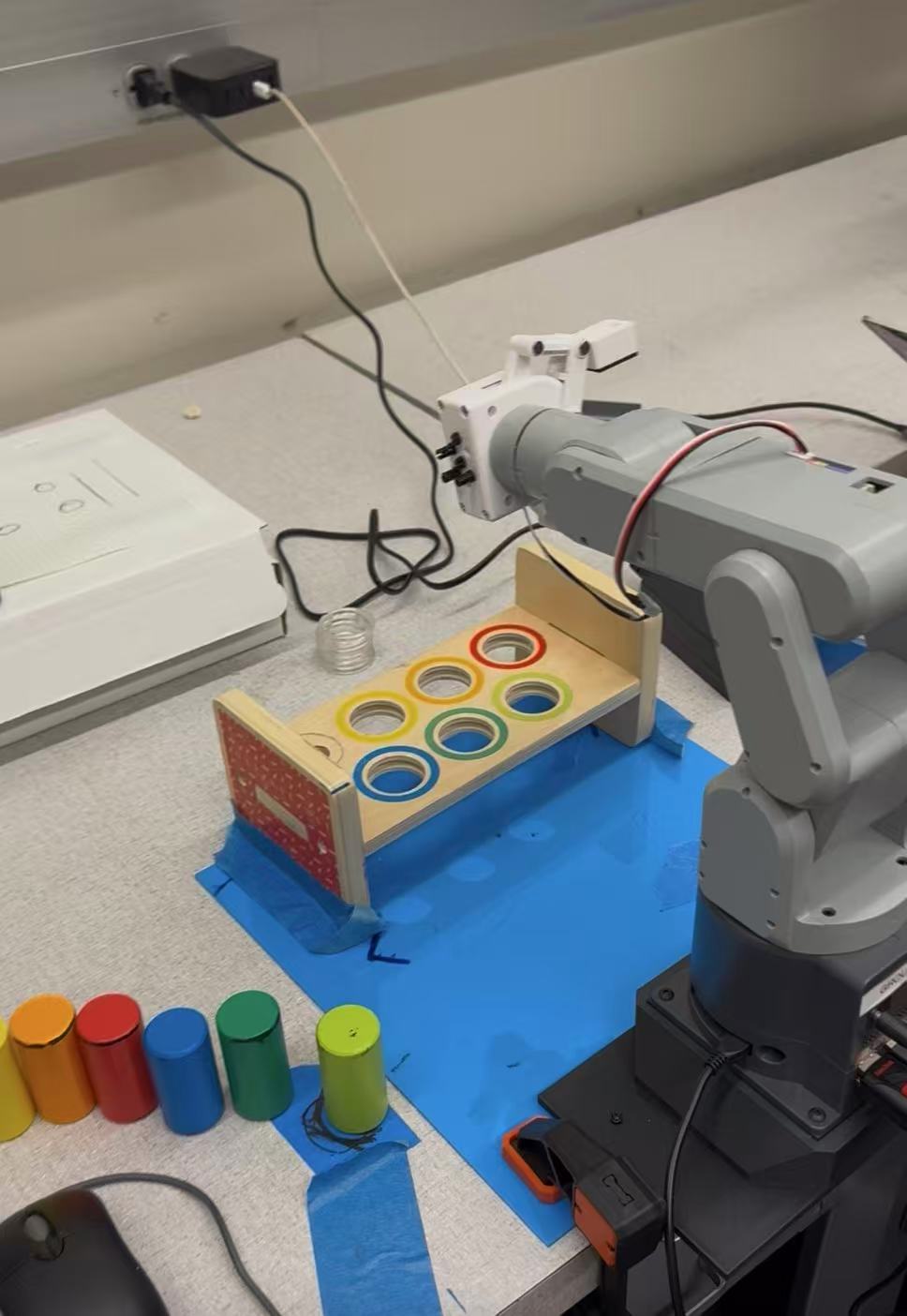
Created a Python workflow for 6-DOF manipulator modeling using Denavit-Hartenberg parameters, forward kinematics, numerical inverse kinematics, and trajectory generation for pick-and-place tasks.
What this demonstrates: Strong mathematical modeling, robotics reasoning, and the ability to turn theory into validated motion-planning workflows.
Hardware Integration
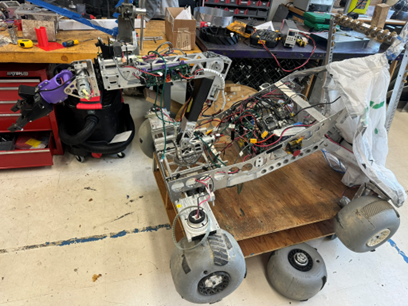
Designed and assembled a course robot with Arduino control, custom PCB sensing hardware, photoresistors, motors, and a 3D-printed chassis, then iteratively tuned it through repeated track testing.
What this demonstrates: Hands-on electromechanical integration, iterative testing, and system tuning from build to measurable performance.

Digital Systems / FPGA
Built a SystemVerilog design for a DE1-SoC FPGA that interfaces with a simulated 3D parking lot, autonomously controls entry and exit gates, tracks occupancy across three spaces, detects rush-hour timing, and stores hourly car-count data in dual-port RAM.
What this demonstrates: Strong digital design fundamentals, FSM and ASMD decomposition, FPGA I/O integration, and practical hardware-interface thinking.
Sensor Subsystem
Supported Husky Robotics sensor planning for a Mars-style rover, evaluating environmental sensing options and integration tradeoffs across gas, temperature, humidity, and subsurface measurement goals.
What this demonstrates: Systems-level thinking around sensor selection, integration feasibility, and mission-driven engineering tradeoffs.
Data Pipeline
Built a Python data workflow that ingested multi-year CSV datasets, handled incomplete records, generated country-level visualizations, and estimated future production demand using forecasting logic.
What this demonstrates: Clean analytical implementation, data validation discipline, and the ability to turn raw datasets into interpretable forecasts.
NLP / Analytics
Developed Python and Jupyter workflows for preprocessing educational text data, running topic-modeling experiments, and evaluating model quality with accuracy, precision, recall, and F1 metrics.
What this demonstrates: Applied ML experimentation, structured evaluation, and comfort working with unstructured datasets and model tradeoffs.
Skills
C, C++, Python, Java, SQL
ESP32, FreeRTOS, I2C, interrupt programming, PCB design, circuit testing, sensor integration
Data ingestion, ETL-style transformation, forecasting, topic modeling, clustering, model evaluation
Altium Designer, Keil5, Jupyter Notebook, Git, Linux, Matplotlib, SolidWorks, AutoCAD
Current Search
I am especially interested in embedded systems, robotics, hardware-software integration, controls-adjacent engineering, and technically rigorous roles where debugging and practical execution matter.
Recruiter Contact
If you are hiring for embedded systems, robotics, systems integration, or technically hands-on roles, this form will send your note straight to my inbox.